联系我们
联系我们

库卡KUKA机器人常用型号:
KR 3 R540、KR 6 R700-2、KR 6 R900-2、KR 10 R1100-2、KR 10 R1420、KR 16 R1610-2、KR 16 R2010-2、KR 20 R1810-2、KR 30-3、KR 60-3、KR 210 R2700-2、KR 180 R3200 PA、KR 240 R3200 PA、KR 500 R2830。
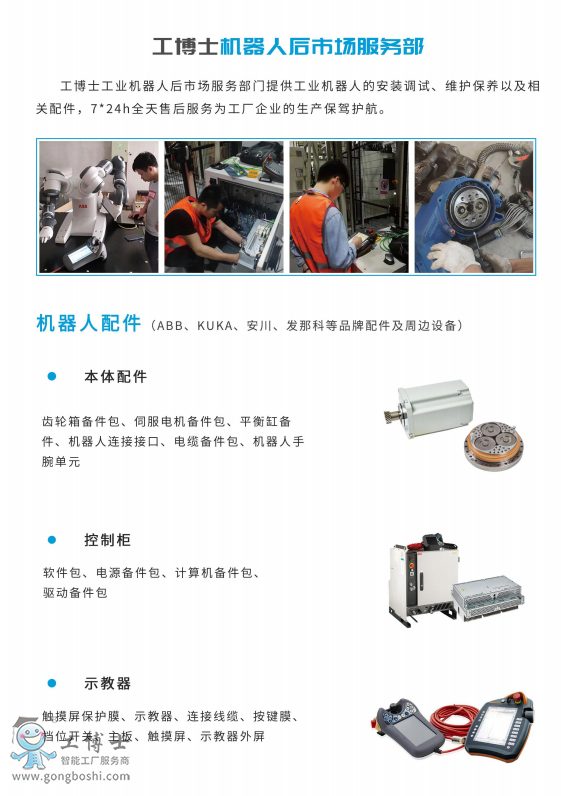
工业机器人由下列部件构成:
机械手
机器人控制系统
手持式编程器 smartPAD
连接电缆
软件
选项,附件
库卡机器人控制系统概览
机器人控制系统可用于控制下列系统:
库卡小型机器人
机器人控制器由下列元件组成:
控制 PC
电力部件
安全逻辑系统
手持式编程器 smartPAD
接线面板
机器人控制系统可安装在 19" 支架中。
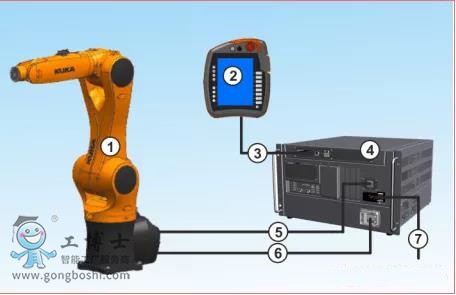
上图库卡工业机器人示例
1 机械手
2 手持式编程器
3 连接线缆 /smartPAD
4 机器人控制系统
5 连接线缆 / 数据线
6 连接线缆 / 电机导线
7 设备连接线缆

上图 KR C4 compact 概览
1 控制部件 (控制箱)
2 电力部件 (驱动装置箱)
3.3 KR C4 compact 的可选接口
概览 库卡机器人控制系统的接线板包含下列线路的接口:
电源线 / 供电线
用于机械手的电机导线
用于机械手的数据线
库卡 smartPAD 线路
PE 线路
外围导线
视具体选项和客户需求而定,接线板可附设不同的零部件。
接线面板

上图 : 接线面板
1 插槽 1
2 插槽 2
3 X42 参考开关
4 外部供电的 X55 接口
5 插槽 4
6 X12 接口 (带 IOB-16-16B)
7 附加轴驱动装置箱的 X28 接口
8 X12 Beckhoff 数字输入 / 输出接口
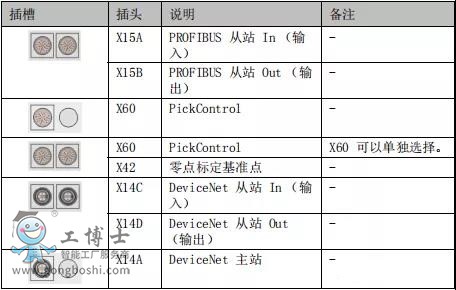
插槽 1 可供以下接口使用:

插槽 2 可供以下接口使用:
以下接口可以组合:
PROFIBUS:
X61 与 X55
X61 与 X55 和 X12
X61 与 X55 和 X60
X61 与 X55 和 X42
X61 与 X15 A/X15B 和 X55
X15 A/X15B 与 X55
X15 A/X15B 与 X55 和 X12
X15 A/X15B 与 X55 和 X60
DeviceNet:
X14A 与 X55
X14A 与 X55 和 X12
X14A 与 X55 和 X60
X14A 与 X14C/X14D 和 X55
X14C/X14D 与 X55
X14C/X14D 与 X55 和 X12
X14C/X14D 与 X55 和 X60
外部供电:
X55
X55 与输入 / 输出模块 16/16 的 X12
X55 与输入 / 输出模块 16/16 的 X12 和 X60
X55 与输入 / 输出模块 16/16/4 的 X12
X55 与 X67.1 和 X67.2
X55 与 X60
X55 与输入 / 输出模块 16/16 的 X60 和 X12
插槽 4 的配置 插槽 4 可供以下接口使用: